Ceci est le menu principal .

Ceci est un menu pour surveiller la tension, la consommation totale et sa répartition entre les 2 batteries (on voit ici que la batterie 1 a une résistance interne plus élevée que la résistance de la batterie 2.

Dans le menu principal, on a choisit "editer" le modèle courant.
On peut facilement faire glisser le texte pour voir ce qui est à
droite ou en dessous et utiliser l'éditeur de Android.
Après modification, on appuye sur le bouton "OK" situé en haut à
gauche; ceci revoie le fichier vers la carte SD de l'émetteur. On
peut le sauver sous un autre nom .
Pour abandonner la mise à jour il suffit d'utiliser la fonction
"retour" du browser (flèche à gauche, en bas)
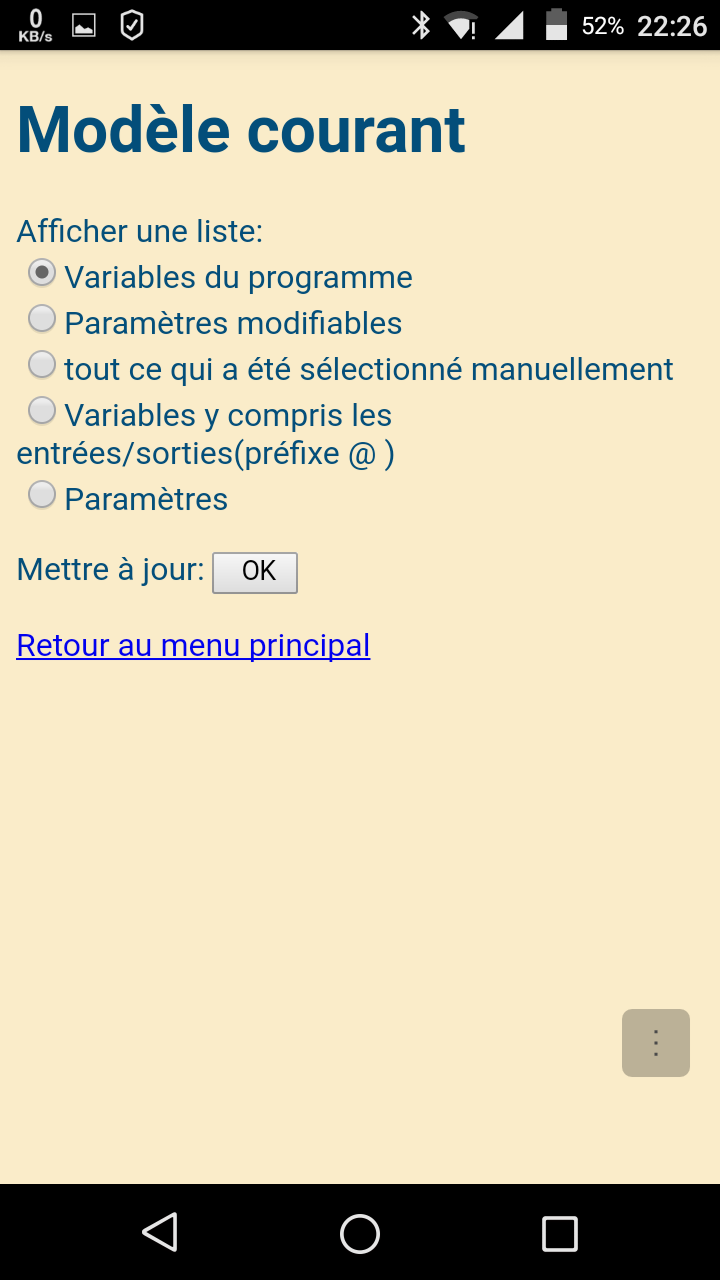
Dans le menu principal, on a choisit "Modèle courant" pour
afficher les données ou modifier les réglages du modèle:
- la liste des variables utilisées ou définies dans le programme,
à l'exception des entrées -sorties
-la liste des paramètres . C'est ici qu'on peut régler un modèle.
Les paramètres sont définis dans le programme ou ddans un module
appelé par le programme
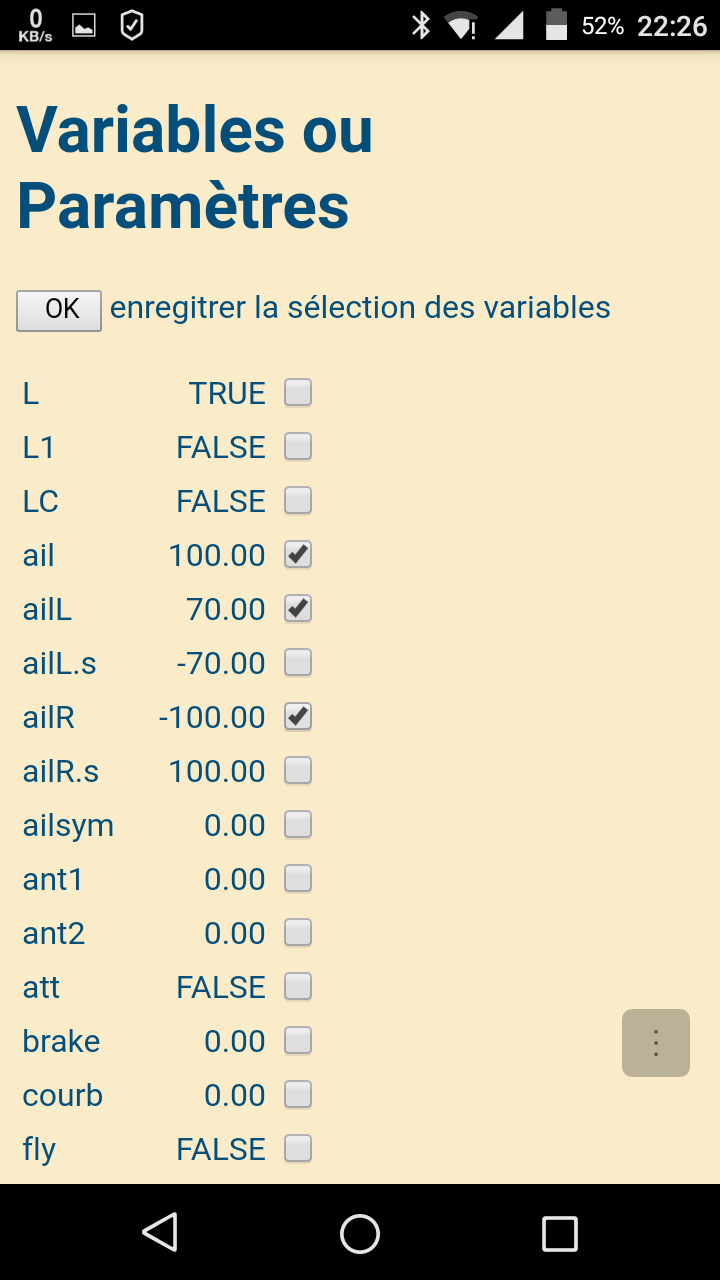
La liste des variables est affichée de façon statique, sans
suivre les mouvements éventuels.
Chaque variable peut être "sélectionnée". C'est une façon de se
faire une liste courte.
On pourrait par exemple choisir
- l'organe de commande des ailerons (@M2 pour moi)
- la commande de vol "ail" qui a été calculée à partir du manche,
avec une mise à l'échelle et un "expo"
- les commandes de gouvernes ailL et ailR
-finalement on pourrait afficher les commandes de servo
En choisissant le menu "Modèle courant" puis "tout ce qui est
sélectionné" on aura la liste de ces variables, affichée de façon
dynamique. Il suffit d'actionner le manche pour voir les valeurs
des variables calculées.
Mes derniers modules n'utilisent plus l'échelle classique " -100%
à +100%" : toutes les commandes de vol sont exprimées en mm
Si vous ajouter ici les commandes de vol pour la profondeur et les
freins et les autres gouvernes éventuelles (flaps) , vous pouvez
vérifier tous les réglages sans le planeur à côté de vous !

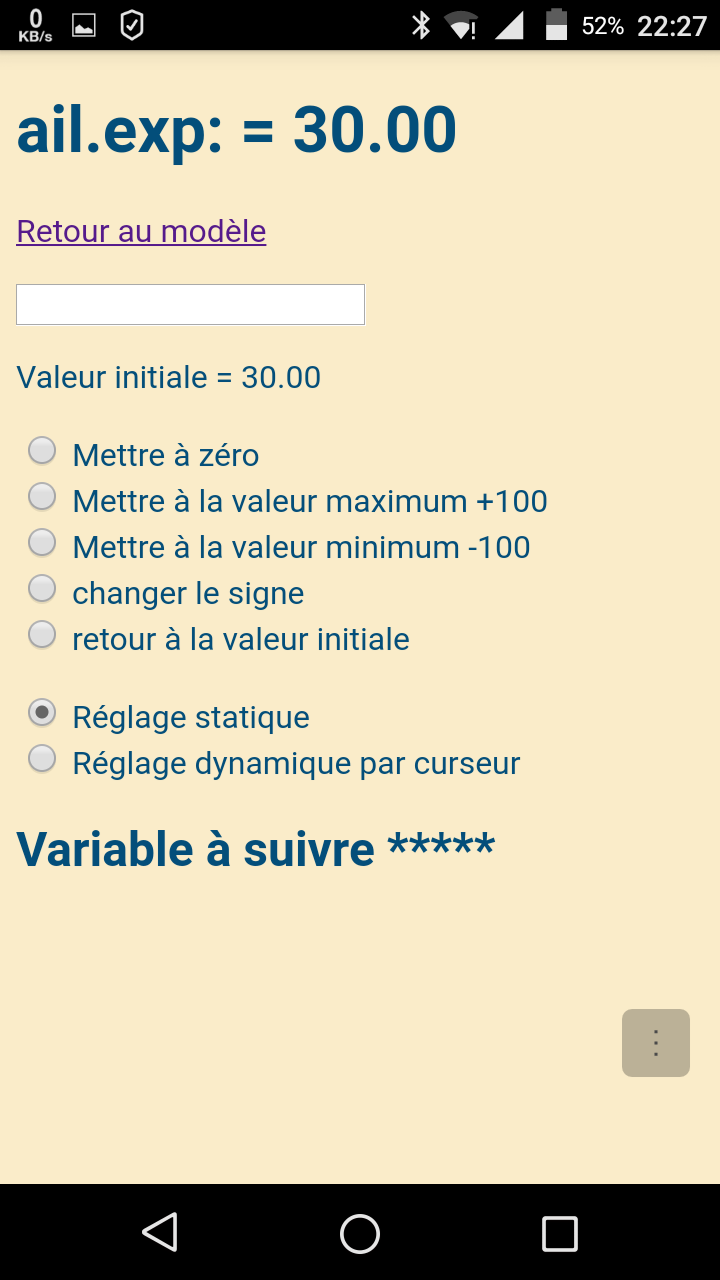
Ici on a choisit "Modèle courant" puis "paramètres modifiables".
Dès qu'on sélectionne un paramètre , l'écran suivant s'affiche.
Vous pouvez facilement introduire une autre valeur , par
exemple en sélectionnant la zone de texte qui est en blanc.
Il apparait un petit clavier numérique , introduisez la nouvelle
valeur et cloturez l'entrée . Le paramètre sera immédiatement
mis-à-jour sur l'émetteur.
Ceci est la façon normale de modifier un paramètre.
On peut également choisir une variable sélectionnée: elle apparaît
en dessous. Ceci permet de modifier un paramètre pour obtenir une
valeur déterminée.
Exemple: un avion vole correctement avec le trim de profondeur
décalé.
Le réglage dynamique permet de corriger un paramètres par petites
touches jusqu'à ce que le résultat voulu soit atteint.
Dans le menu principal, on a choisit "Fichers" et on peut
choisir:
- un modèle(fichier MDX) à modifier ou à consulter avec des lignes
numérotées (les messages d'erreur indiquent un numéro de ligne
-un module (fichier MDM)
On peut également consulter un fichier logging (sous forme de
texte...le graphique suivra), consulter le fichier de tous les
paramètres d'un modèle et quelques autres fichiers qui ont été
décrits ailleurs.